Robotik:
|
| M187.00 |
|
|
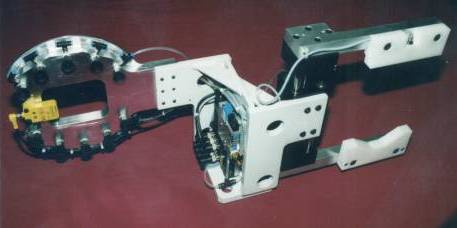
Roboter-Greifer für LKW-Radkappen
|
Kurzbeschreibung:
- Be- und Entladen einer
Drückbank mit Kawasaki-Roboter FS20.
- Doppelgreifer für Zuführung der Rohlinge aus Stapelmagazinen bzw.
Abführung der Fertigteile auf Rollengang.
- Handling von fünf verschiedenen Werkstücken.
- Arbeitsrhythmus abgestimmt auf die techn. Möglichkeiten der Maschine.
- Komplettaufbau der Bearbeitungszelle mit Grundplatte, Sockel, Einhausung,
Bedienung der Be-/Entladetür, Verknüpfung mit der Drückbank etc.
>>>
more...
|
|
|
|
| HMI - Projekt |
|
|
Robotgesteuertes Laserbeschriftungssystem

|
Kurzbeschreibung:
- Bauteilübernahme vom Warenträgersystem per
Roboter
- Positionierung in der Laserbox, unter dem
Beschriftungslaser, per Roboter
- Frei wählbare und einstellbare Beschriftung über
die entsprechende Software
- Hier: Aufbringung von 3 Schriftreihen mit je
max. 10 Zeichen
- Beschriftung auf Bauteil Vorder- und Rückseite
- LBS-300-System mit Nd.-YAG Laser
- Modularer Aufbau für individuellen Einsatz
- Software mit einfacher und übersichtlicher
Bedienung
- Kawasaki-Industrieroboter FS03 mit Controller
und Touch-Panel
>>>
more...
|
|
|
|
| |
|
|

|
Kurzbeschreibung:
- Raststücke für Papierlocher sortieren, linear fördern
und vereinzeln.
- Anschlagschienen für Papierlocher sortieren, linear fördern
und vereinzeln.
- Raststücke mit Hub-Drehgreifer abnehmen und in Warenträger
einsetzen.
- Anschlagschienen mit Hub-Drehgreifer abnehmen und in Raststücke
einsetzen.
- Warenträger linear vorwärts bewegen und dabei Raststücke
in endgültige Rastposition verschieben.
- Bereitstellung von je vier Zusammenbauten zur Abnahme durch
einen Roboter.
- Warenträger unterhalb der Einsetzebene wieder zur Einsetzposition
zurückschieben.
- Steuerung mit Siemens S7, ausgelegt für Step-Betrieb und
Automatik.
- Alle Arbeitsschritte werden überwacht, alle Betriebszustände
werden angezeigt.
- Klartextanzeige mit OP 7
|
Montageautomat für
Raststücke und Anschlagschienen für Bürolocher.
|
 |
| Übernahme / Übergabe
von je 4 Zusammenbauten vom Roboter des Montageautomaten zum Roboter
der Verpackungsmaschine. |